

自動運転バスは、「センサーやカメラによる周囲把握」。「衛星からの信号受信」という2つの技術で精密に自己位置を特定しています。
特定した自己位置と事前に作成された走行ルートを照合することで、自動運転走行を実現し、さらに、道路に配置されたインフラ設備を活用することで、より安全で快適な走行が可能です。
ここがスゴイゾ!
自動運転バスの仕組み
たくさんのカメラで
情報をキャッチ!
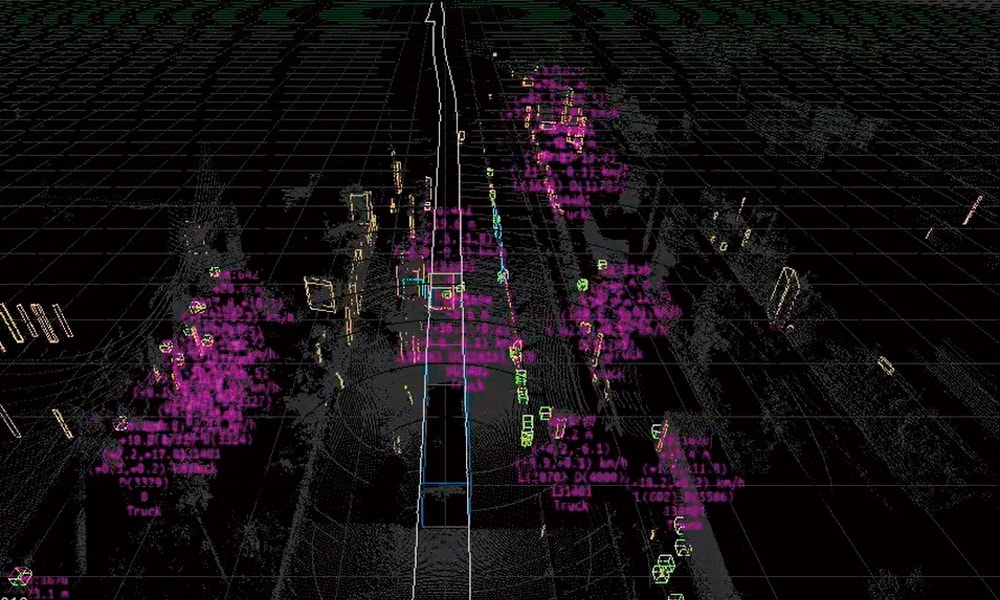
LiDAR
車や歩行者、建物との距離を
把握し、衝突を防ぐ!
LiDAR(ライダー)は、「Light Detection and Ranging(光による検知と測距)」の頭文字をとった言葉です。照射するレーザー光が物体に当たって跳ね返ってくるまでの時間を計測し、物体までの距離や方向を測定します。この技術で先行車・歩行者・建物などの距離や形状、位置関係を3次元で把握し、正確な障害物回避を可能にしています。また、3次元地図とLiDARで取得した情報の比較により、精密な自己位置の推定ができます。
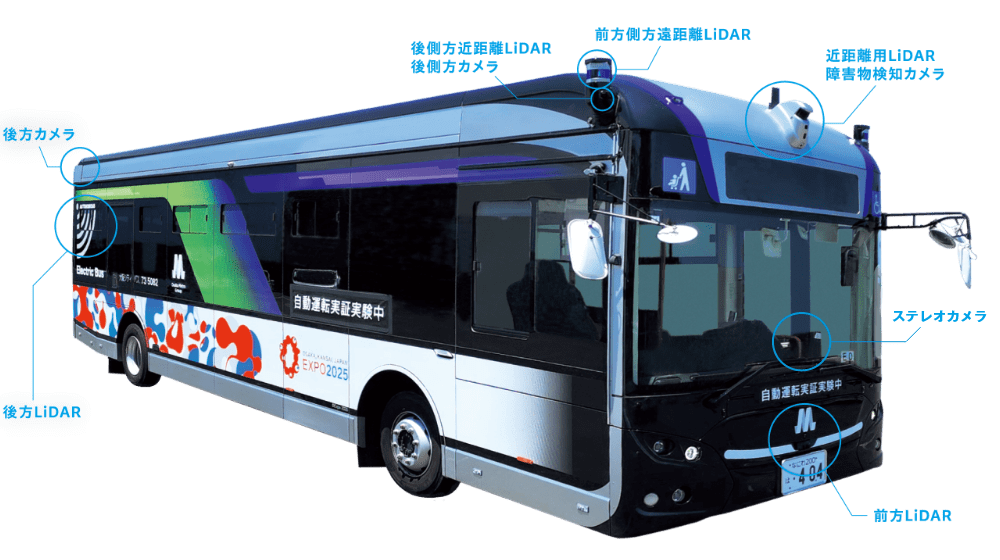

ステレオカメラ
ステレオカメラは、人間が2つの目で物を見るように、2つのカメラで構成され、この仕組みにより奥行きのある情報を把握できます。車両前方の歩行者や障害物に加え、地面の凹凸まで精度良く検出することができます。

周囲監視カメラ
巻き込み確認や車両周辺の歩行者や自転車、障害物の検知に使用します。
走行ルートの3次元地図
を事前にインプット!
マップマッチング
事前に作成した走行ルートの
3次元地図の情報を常に確認!
事前に作成した走行ルートの情報と、走行中にLiDARで把握した情報を重ね合わせることで自己位置を特定する技術です。特に、トンネル内や高層ビルの間など、GNSSが受信できない環境で活躍します。
衛星を受信して
位置を特定!
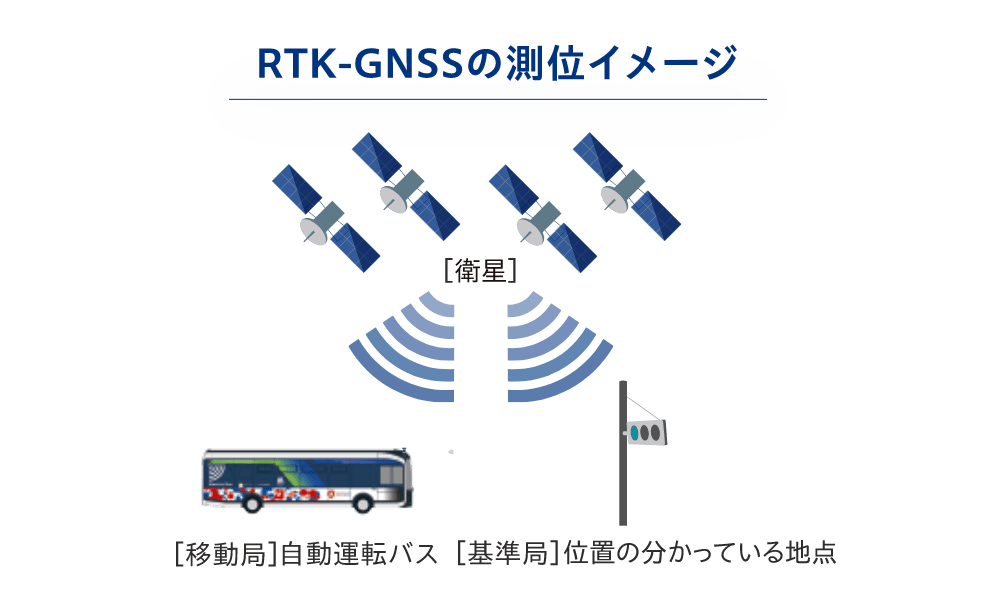
RTK-GNSS
衛星でバスの位置を
誤差数cm以内に特定!
GNSS(全球測位衛星システム)は、電波を使い複数の測位衛星とアンテナの距離を割り出し、位置を特定する技術です。
RTK(Real Time Kinematic)-GNSSは、GNSSの中でも「相対測位」と呼ばれる測定方法のひとつです。自動運転バス(移動局)と、他に位置の分かっている地点(基準局)の2つの受信機で、4つ以上の衛星から信号を受信して、位置を特定する技術です。


スマートポール
ポールに取り付けられたセンサーやカメラによって取得した情報を、近づいてくる自動運転バスに事前に連携。その情報により、自動運転バスの死角となる範囲やこれから走行するルートの交通状況を把握し、より安全に走行することができます。
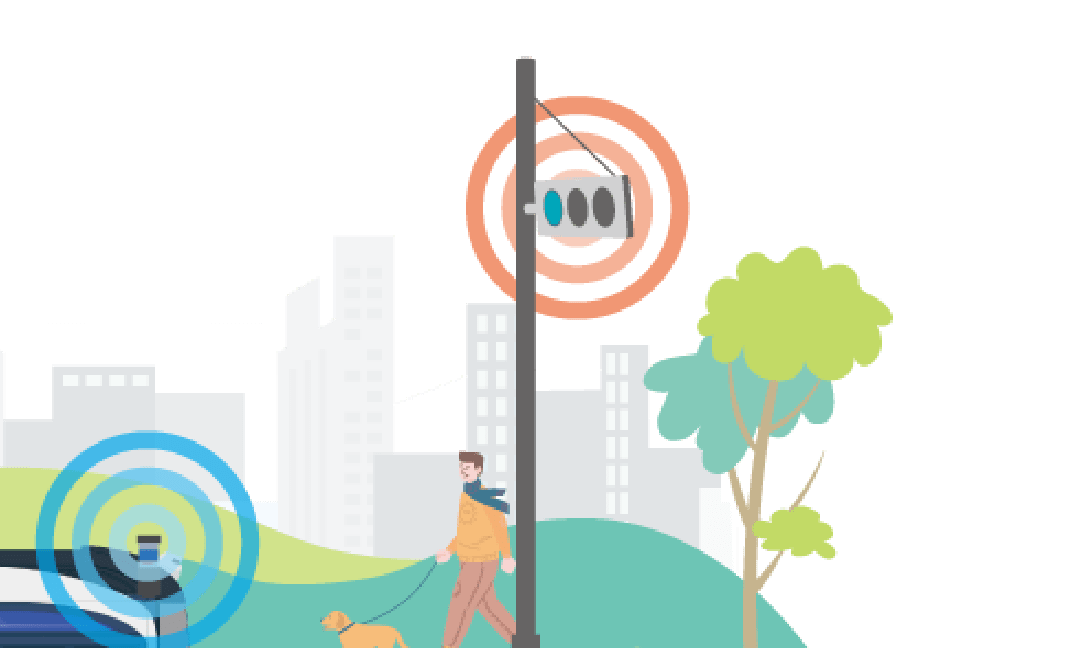
信号情報
信号機の灯色・矢印の情報を自動運転バスに連携することで、自動運転バスから信号機が見えにくい際の補助を行います。また、信号機が次の色に変わるまでの秒数を連携し、ブレーキとアクセルのコントロールを支援することで、急ブレーキや急発進を防ぎます。
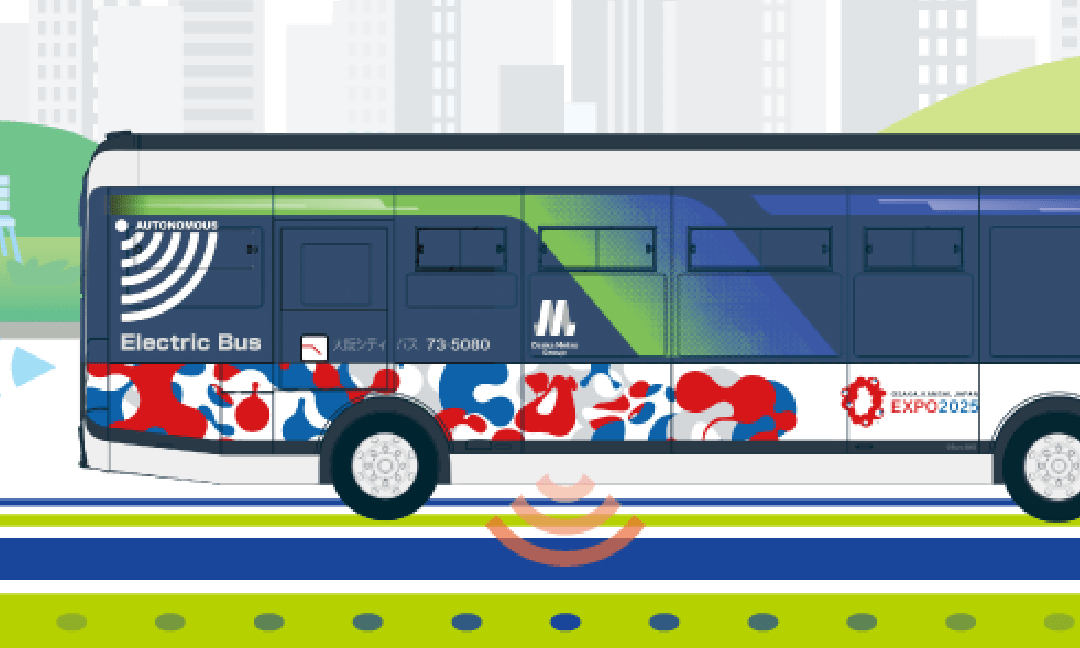
磁気マーカ
道路に磁石を設置し、磁気マーカセンサーを搭載した自動運転バスがその上を走行します。自動運転バスが走行する方向に対して、縦・横方向の双方、又は片方のベクトルで自己位置を補正することができます。
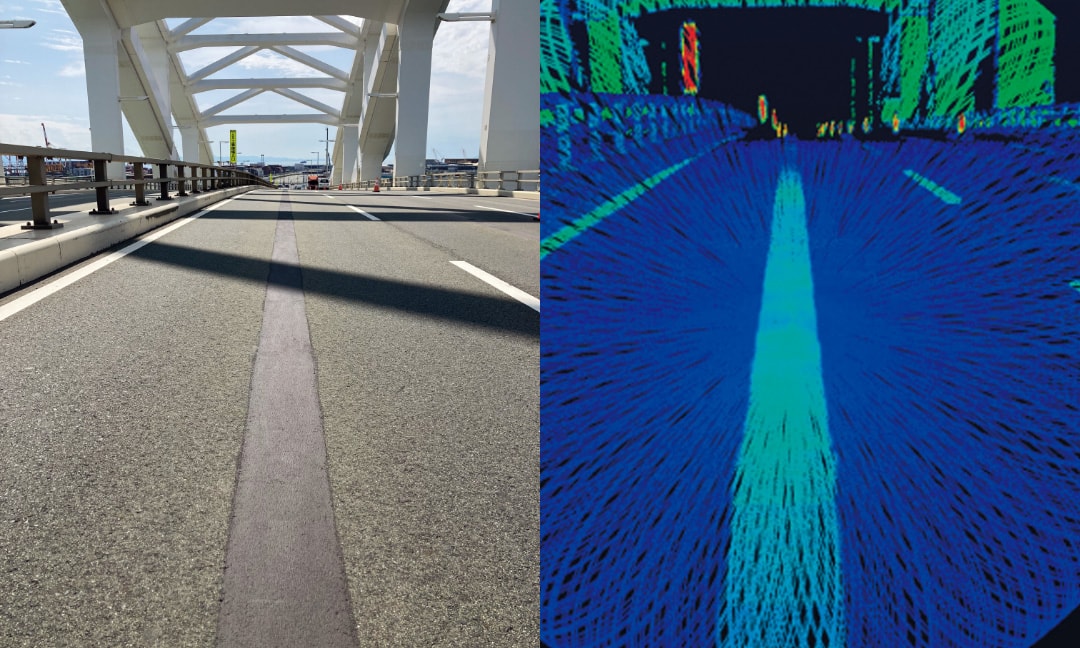
ターゲットライン®ペイント
LiDARが認識できる特殊塗料です。走行ルートに塗装されたペイントを認識・追従することで自動走行を実現できるため、GNSS受信不良やマップマッチングが難しいエリアでの自動運転を可能にします。また、アスファルトと同系色のため、ペイントが道路の路面標示と誤認されるリスクがなく、公道での塗装も可能となっています。
※ターゲットライン®ペイントは、日本ペイント・インダストリアルコーティングス株式会社が開発した自動運転塗料の登録商標です。